Probabilistic RNN#
In this notebook, we show an example of how a probabilistic RNN can be used with darts. This type of RNN was inspired by, and is almost identical to DeepAR: https://arxiv.org/abs/1704.04110
[1]:
# fix python path if working locally
from utils import fix_pythonpath_if_working_locally
fix_pythonpath_if_working_locally()
[2]:
%load_ext autoreload
%autoreload 2
%matplotlib inline
[ ]:
# use darts plotting style
from darts import set_option
set_option("plotting.use_darts_style", True)
[3]:
import warnings
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import darts.utils.timeseries_generation as tg
from darts import TimeSeries
from darts.dataprocessing.transformers import Scaler
from darts.datasets import EnergyDataset
from darts.models import RNNModel
from darts.timeseries import concatenate
from darts.utils.callbacks import TFMProgressBar
from darts.utils.likelihood_models.torch import GaussianLikelihood
from darts.utils.missing_values import fill_missing_values
from darts.utils.timeseries_generation import datetime_attribute_timeseries
warnings.filterwarnings("ignore")
import logging
logging.disable(logging.CRITICAL)
def generate_torch_kwargs():
# run torch models on CPU, and disable progress bars for all model stages except training.
return {
"pl_trainer_kwargs": {
"accelerator": "cpu",
"callbacks": [TFMProgressBar(enable_train_bar_only=True)],
}
}
Variable noise series#
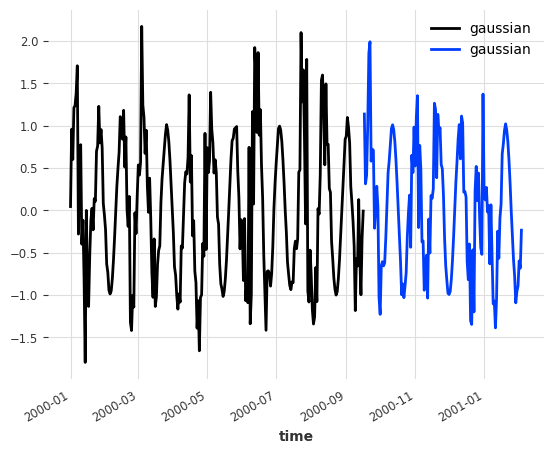
As a toy example we create a target time series that is created by taking the some of a sine wave and a gaussian noise series. To make things interesting, the intensity of the gaussian noise is also modulated by a sine wave (with a different frequency). This means that the effect of the noise gets stronger and weaker in an oscillating fashion. The idea is to test whether a probabilistic RNN can model this oscillating uncertainty in its predictions.
[4]:
length = 400
trend = tg.linear_timeseries(length=length, end_value=4)
season1 = tg.sine_timeseries(length=length, value_frequency=0.05, value_amplitude=1.0)
noise = tg.gaussian_timeseries(length=length, std=0.6)
noise_modulator = (
tg.sine_timeseries(length=length, value_frequency=0.02)
+ tg.constant_timeseries(length=length, value=1)
) / 2
noise = noise * noise_modulator
target_series = sum([noise, season1])
covariates = noise_modulator
target_train, target_val = target_series.split_after(0.65)
[5]:
target_train.plot()
target_val.plot()
[5]:
<Axes: xlabel='time'>
In the following we train a probabilistic RNN to predict the targets series in an autoregressive fashion, but also by taking into consideration the modulation of the noise component as a covariate which is known in the future. So the RNN has information on when the noise component of the target is severe, but it doesn’t know the noise component itself. Let’s see if the RNN can make use of this information.
[6]:
my_model = RNNModel(
model="LSTM",
hidden_dim=20,
dropout=0,
batch_size=16,
n_epochs=50,
optimizer_kwargs={"lr": 1e-3},
random_state=0,
training_length=50,
input_chunk_length=20,
likelihood=GaussianLikelihood(),
**generate_torch_kwargs(),
)
my_model.fit(target_train, future_covariates=covariates)
[6]:
RNNModel(model=LSTM, hidden_dim=20, n_rnn_layers=1, dropout=0, training_length=50, batch_size=16, n_epochs=50, optimizer_kwargs={'lr': 0.001}, random_state=0, input_chunk_length=20, likelihood=GaussianLikelihood(prior_mu=None, prior_sigma=None, prior_strength=1.0, beta_nll=0.0), pl_trainer_kwargs={'accelerator': 'cpu', 'callbacks': [<darts.utils.callbacks.TFMProgressBar object at 0x2b3386350>]})
[7]:
pred = my_model.predict(80, num_samples=50)
target_val.slice_intersect(pred).plot(label="target")
pred.plot(label="prediction")
[7]:
<Axes: xlabel='time'>
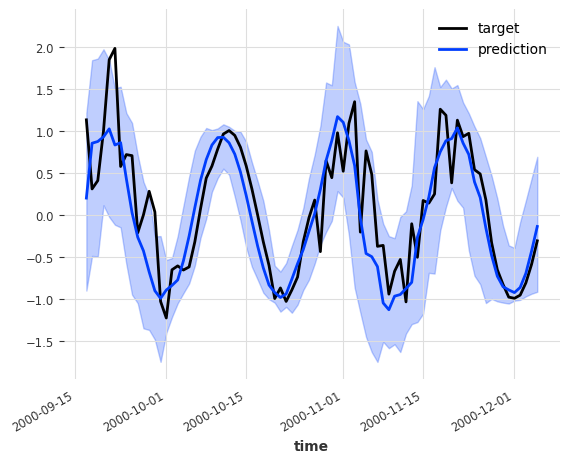
We can see that, on top of correctly predicting the, granted, simple oscillatory behavior of the target, the RNN correctly expresses more uncertainty in its predictions when the noise component is higher.
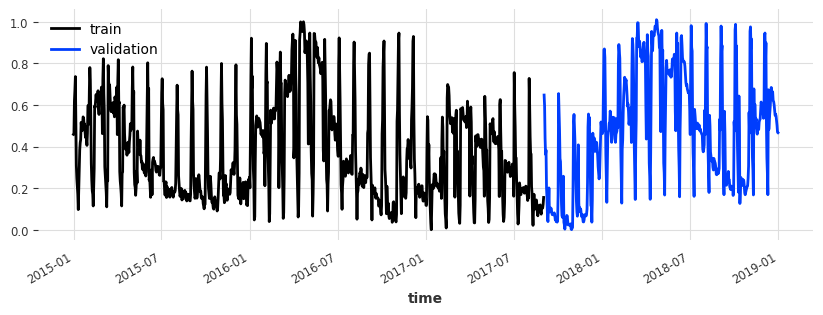
Daily energy production#
[8]:
df3 = EnergyDataset().load().to_dataframe()
df3_day_avg = (
df3.groupby(df3.index.astype(str).str.split(" ").str[0]).mean().reset_index()
)
series_en = fill_missing_values(
TimeSeries.from_dataframe(
df3_day_avg, "time", ["generation hydro run-of-river and poundage"]
),
"auto",
)
# convert to float32
series_en = series_en.astype(np.float32)
# create train and test splits
train_en, val_en = series_en.split_after(pd.Timestamp("20170901"))
# scale
scaler_en = Scaler()
train_en_transformed = scaler_en.fit_transform(train_en)
val_en_transformed = scaler_en.transform(val_en)
series_en_transformed = scaler_en.transform(series_en)
# add the day as a covariate (no scaling required as the day is one-hot-encoded)
day_series = datetime_attribute_timeseries(
series_en, attribute="day", one_hot=True, dtype=np.float32
)
plt.figure(figsize=(10, 3))
train_en_transformed.plot(label="train")
val_en_transformed.plot(label="validation")
[8]:
<Axes: xlabel='time'>
[9]:
model_name = "LSTM_test"
model_en = RNNModel(
model="LSTM",
hidden_dim=20,
n_rnn_layers=2,
dropout=0.2,
batch_size=16,
n_epochs=10,
optimizer_kwargs={"lr": 1e-3},
random_state=0,
training_length=300,
input_chunk_length=300,
likelihood=GaussianLikelihood(),
model_name=model_name,
save_checkpoints=True, # store the latest and best performing epochs
force_reset=True,
**generate_torch_kwargs(),
)
[10]:
model_en.fit(
series=train_en_transformed,
future_covariates=day_series,
val_series=val_en_transformed,
val_future_covariates=day_series,
)
[10]:
RNNModel(model=LSTM, hidden_dim=20, n_rnn_layers=2, dropout=0.2, training_length=300, batch_size=16, n_epochs=10, optimizer_kwargs={'lr': 0.001}, random_state=0, input_chunk_length=300, likelihood=GaussianLikelihood(prior_mu=None, prior_sigma=None, prior_strength=1.0, beta_nll=0.0), model_name=LSTM_test, save_checkpoints=True, force_reset=True, pl_trainer_kwargs={'accelerator': 'cpu', 'callbacks': [<darts.utils.callbacks.TFMProgressBar object at 0x2c1c97a00>]})
Let’s load the model at the best performing state
[11]:
model_en = RNNModel.load_from_checkpoint(model_name=model_name, best=True)
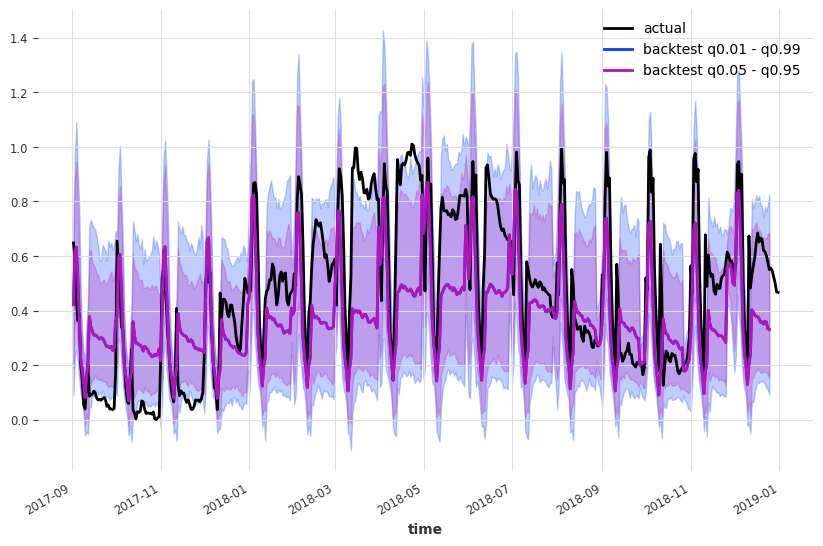
Now we perform historical forecasts:
we start predictions at the beginning of the validation series (
start=val_en_transformed.start_time())each prediction will have length
forecast_horizon=30.the next prediction will start
stride=30points aheadwe keep all predicted values from each forecast (
last_points_only=False)continue until we run out of input data
In the end we concatenate the historical forecasts to get a single continuous (on time axis) time series
[12]:
backtest_en = model_en.historical_forecasts(
series=series_en_transformed,
future_covariates=day_series,
start=val_en_transformed.start_time(),
num_samples=500,
forecast_horizon=30,
stride=30,
retrain=False,
verbose=True,
last_points_only=False,
)
backtest_en = concatenate(backtest_en, axis=0)
[13]:
plt.figure(figsize=(10, 6))
val_en_transformed.plot(label="actual")
backtest_en.plot(label="backtest q0.01 - q0.99", low_quantile=0.01, high_quantile=0.99)
backtest_en.plot(label="backtest q0.05 - q0.95", low_quantile=0.05, high_quantile=0.95)
plt.legend()
[13]:
<matplotlib.legend.Legend at 0x2c0581de0>
[ ]: